ESP-IDF FreeRTOS SMP Changes¶
Overview¶
The vanilla FreeRTOS is designed to run on a single core. However the ESP32 is dual core containing a Protocol CPU (known as CPU 0 or PRO_CPU) and an Application CPU (known as CPU 1 or APP_CPU). The two cores are identical in practice and share the same memory. This allows the two cores to run tasks interchangeably between them.
The ESP-IDF FreeRTOS is a modified version of vanilla FreeRTOS which supports symmetric multiprocessing (SMP). ESP-IDF FreeRTOS is based on the Xtensa port of FreeRTOS v8.2.0. This guide outlines the major differences between vanilla FreeRTOS and ESP-IDF FreeRTOS. The API reference for vanilla FreeRTOS can be found via http://www.freertos.org/a00106.html
For information regarding features that are exclusive to ESP-IDF FreeRTOS, see ESP-IDF FreeRTOS Additions.
Backported Features: Although ESP-IDF FreeRTOS is based on the Xtensa port of FreeRTOS v8.2.0, a number of FreeRTOS v9.0.0 features have been backported to ESP-IDF.
Tasks and Task Creation: Use xTaskCreatePinnedToCore() or
xTaskCreateStaticPinnedToCore() to create tasks in ESP-IDF FreeRTOS. The
last parameter of the two functions is xCoreID. This parameter specifies
which core the task is pinned to. Acceptable values are 0 for PRO_CPU,
1 for APP_CPU, or tskNO_AFFINITY which allows the task to run on
both.
Round Robin Scheduling: The ESP-IDF FreeRTOS scheduler will skip tasks when implementing Round-Robin scheduling between multiple tasks in the Ready state that are of the same priority. To avoid this behavior, ensure that those tasks either enter a blocked state, or are distributed across a wider range of priorities.
Scheduler Suspension: Suspending the scheduler in ESP-IDF FreeRTOS will only
affect the scheduler on the the calling core. In other words, calling
vTaskSuspendAll() on PRO_CPU will not prevent APP_CPU from scheduling, and
vice versa. Use critical sections or semaphores instead for simultaneous
access protection.
Tick Interrupt Synchronicity: Tick interrupts of PRO_CPU and APP_CPU
are not synchronized. Do not expect to use vTaskDelay() or
vTaskDelayUntil() as an accurate method of synchronizing task execution
between the two cores. Use a counting semaphore instead as their context
switches are not tied to tick interrupts due to preemption.
Critical Sections & Disabling Interrupts: In ESP-IDF FreeRTOS, critical sections are implemented using mutexes. Entering critical sections involve taking a mutex, then disabling the scheduler and interrupts of the calling core. However the other core is left unaffected. If the other core attemps to take same mutex, it will spin until the calling core has released the mutex by exiting the critical section.
Floating Point Aritmetic: The ESP32 supports hardware acceleration of single
precision floating point arithmetic (float). However the use of hardware
acceleration leads to some behavioral restrictions in ESP-IDF FreeRTOS.
Therefore, tasks that utilize float will automatically be pinned to a core if
not done so already. Furthermore, float cannot be used in interrupt service
routines.
Task Deletion: Task deletion behavior has been backported from FreeRTOS
v9.0.0 and modified to be SMP compatible. Task memory will be freed immediately
when vTaskDelete() is called to delete a task that is not currently running
and not pinned to the other core. Otherwise, freeing of task memory will still
be delegated to the Idle Task.
Thread Local Storage Pointers & Deletion Callbacks: ESP-IDF FreeRTOS has backported the Thread Local
Storage Pointers (TLSP) feature. However the extra feature of Deletion Callbacks has been
added. Deletion callbacks are called automatically during task deletion and are
used to free memory pointed to by TLSP. Call
vTaskSetThreadLocalStoragePointerAndDelCallback() to set TLSP and Deletion
Callbacks.
Configuring ESP-IDF FreeRTOS: Several aspects of ESP-IDF FreeRTOS can be
set in the project configuration (idf.py menuconfig) such as running ESP-IDF in
Unicore (single core) Mode, or configuring the number of Thread Local Storage Pointers
each task will have.
Backported Features¶
The following features have been backported from FreeRTOS v9.0.0 to ESP-IDF.
Static Alocation¶
This feature has been backported from FreeRTOS v9.0.0 to ESP-IDF. The CONFIG_FREERTOS_SUPPORT_STATIC_ALLOCATION option must be enabled in menuconfig in order for static allocation functions to be available. Once enabled, the following functions can be called…
Other Features¶
Backporting Notes¶
1) xTaskCreateStatic() has been made SMP compatible in a similar
fashion to xTaskCreate() (see Tasks and Task Creation). Therefore
xTaskCreateStaticPinnedToCore() can also be called.
2) Although vanilla FreeRTOS allows the Timer feature’s daemon task to
be statically allocated, the daemon task is always dynamically allocated in
ESP-IDF. Therefore vApplicationGetTimerTaskMemory does not need to be
defined when using statically allocated timers in ESP-IDF FreeRTOS.
3) The Thread Local Storage Pointer feature has been modified in ESP-IDF
FreeRTOS to include Deletion Callbacks (see Thread Local Storage Pointers & Deletion Callbacks). Therefore
the function vTaskSetThreadLocalStoragePointerAndDelCallback() can also be
called.
Tasks and Task Creation¶
Tasks in ESP-IDF FreeRTOS are designed to run on a particular core, therefore
two new task creation functions have been added to ESP-IDF FreeRTOS by
appending PinnedToCore to the names of the task creation functions in
vanilla FreeRTOS. The vanilla FreeRTOS functions of xTaskCreate()
and xTaskCreateStatic() have led to the addition of
xTaskCreatePinnedToCore() and xTaskCreateStaticPinnedToCore() in
ESP-IDF FreeRTOS (see Backported Features).
For more details see freertos/task.c
The ESP-IDF FreeRTOS task creation functions are nearly identical to their
vanilla counterparts with the exception of the extra parameter known as
xCoreID. This parameter specifies the core on which the task should run on
and can be one of the following values.
0pins the task to PRO_CPU1pins the task to APP_CPUtskNO_AFFINITYallows the task to be run on both CPUs
For example xTaskCreatePinnedToCore(tsk_callback, “APP_CPU Task”, 1000, NULL, 10, NULL, 1)
creates a task of priority 10 that is pinned to APP_CPU with a stack size
of 1000 bytes. It should be noted that the uxStackDepth parameter in
vanilla FreeRTOS specifies a task’s stack depth in terms of the number of
words, whereas ESP-IDF FreeRTOS specifies the stack depth in terms of bytes.
Note that the vanilla FreeRTOS functions xTaskCreate() and
xTaskCreateStatic() have been defined in ESP-IDF FreeRTOS as inline functions which call
xTaskCreatePinnedToCore() and xTaskCreateStaticPinnedToCore()
respectively with tskNO_AFFINITY as the xCoreID value.
Each Task Control Block (TCB) in ESP-IDF stores the xCoreID as a member.
Hence when each core calls the scheduler to select a task to run, the
xCoreID member will allow the scheduler to determine if a given task is
permitted to run on the core that called it.
Scheduling¶
The vanilla FreeRTOS implements scheduling in the vTaskSwitchContext()
function. This function is responsible for selecting the highest priority task
to run from a list of tasks in the Ready state known as the Ready Tasks List
(described in the next section). In ESP-IDF FreeRTOS, each core will call
vTaskSwitchContext() independently to select a task to run from the
Ready Tasks List which is shared between both cores. There are several
differences in scheduling behavior between vanilla and ESP-IDF FreeRTOS such as
differences in Round Robin scheduling, scheduler suspension, and tick interrupt
synchronicity.
Round Robin Scheduling¶
Given multiple tasks in the Ready state and of the same priority, vanilla FreeRTOS implements Round Robin scheduling between each task. This will result in running those tasks in turn each time the scheduler is called (e.g. every tick interrupt). On the other hand, the ESP-IDF FreeRTOS scheduler may skip tasks when Round Robin scheduling multiple Ready state tasks of the same priority.
The issue of skipping tasks during Round Robin scheduling arises from the way
the Ready Tasks List is implemented in FreeRTOS. In vanilla FreeRTOS,
pxReadyTasksList is used to store a list of tasks that are in the Ready
state. The list is implemented as an array of length configMAX_PRIORITIES
where each element of the array is a linked list. Each linked list is of type
List_t and contains TCBs of tasks of the same priority that are in the
Ready state. The following diagram illustrates the pxReadyTasksList
structure.
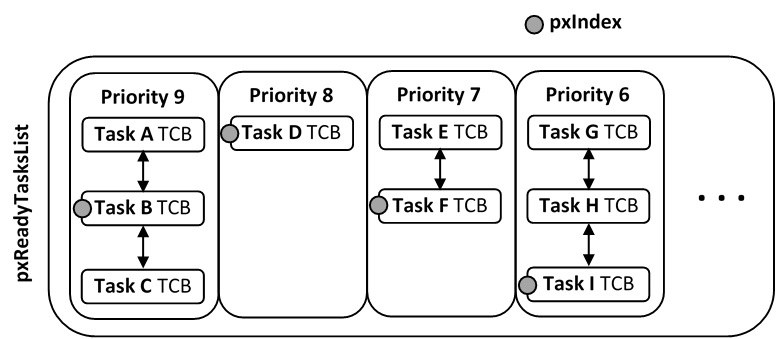
Illustration of FreeRTOS Ready Task List Data Structure
Each linked list also contains a pxIndex which points to the last TCB
returned when the list was queried. This index allows the vTaskSwitchContext()
to start traversing the list at the TCB immediately after pxIndex hence
implementing Round Robin Scheduling between tasks of the same priority.
In ESP-IDF FreeRTOS, the Ready Tasks List is shared between cores hence
pxReadyTasksList will contain tasks pinned to different cores. When a core
calls the scheduler, it is able to look at the xCoreID member of each TCB
in the list to determine if a task is allowed to run on calling the core. The
ESP-IDF FreeRTOS pxReadyTasksList is illustrated below.
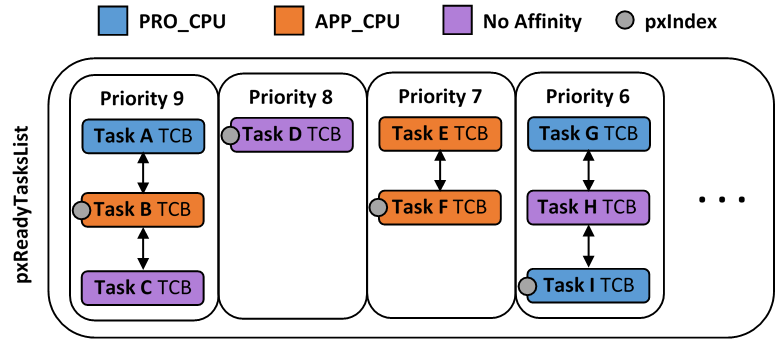
Illustration of FreeRTOS Ready Task List Data Structure in ESP-IDF
Therefore when PRO_CPU calls the scheduler, it will only consider the tasks in blue or purple. Whereas when APP_CPU calls the scheduler, it will only consider the tasks in orange or purple.
Although each TCB has an xCoreID in ESP-IDF FreeRTOS, the linked list of
each priority only has a single pxIndex. Therefore when the scheduler is
called from a particular core and traverses the linked list, it will skip all
TCBs pinned to the other core and point the pxIndex at the selected task. If
the other core then calls the scheduler, it will traverse the linked list
starting at the TCB immediately after pxIndex. Therefore, TCBs skipped on
the previous scheduler call from the other core would not be considered on the
current scheduler call. This issue is demonstrated in the following
illustration.

Illustration of pxIndex behavior in ESP-IDF FreeRTOS
Referring to the illustration above, assume that priority 9 is the highest priority, and none of the tasks in priority 9 will block hence will always be either in the running or Ready state.
1) PRO_CPU calls the scheduler and selects Task A to run, hence moves
pxIndex to point to Task A
2) APP_CPU calls the scheduler and starts traversing from the task after
pxIndex which is Task B. However Task B is not selected to run as it is not
pinned to APP_CPU hence it is skipped and Task C is selected instead.
pxIndex now points to Task C
3) PRO_CPU calls the scheduler and starts traversing from Task D. It skips
Task D and selects Task E to run and points pxIndex to Task E. Notice that
Task B isn’t traversed because it was skipped the last time APP_CPU called
the scheduler to traverse the list.
4) The same situation with Task D will occur if APP_CPU calls the
scheduler again as pxIndex now points to Task E
One solution to the issue of task skipping is to ensure that every task will enter a blocked state so that they are removed from the Ready Task List. Another solution is to distribute tasks across multiple priorities such that a given priority will not be assigned multiple tasks that are pinned to different cores.
Scheduler Suspension¶
In vanilla FreeRTOS, suspending the scheduler via vTaskSuspendAll() will
prevent calls of vTaskSwitchContext from context switching until the
scheduler has been resumed with xTaskResumeAll(). However servicing ISRs
are still permitted. Therefore any changes in task states as a result from the
current running task or ISRSs will not be executed until the scheduler is
resumed. Scheduler suspension in vanilla FreeRTOS is a common protection method
against simultaneous access of data shared between tasks, whilst still allowing
ISRs to be serviced.
In ESP-IDF FreeRTOS, xTaskSuspendAll() will only prevent calls of
vTaskSwitchContext() from switching contexts on the core that called for the
suspension. Hence if PRO_CPU calls vTaskSuspendAll(), APP_CPU will
still be able to switch contexts. If data is shared between tasks that are
pinned to different cores, scheduler suspension is NOT a valid method of
protection against simultaneous access. Consider using critical sections
(disables interrupts) or semaphores (does not disable interrupts) instead when
protecting shared resources in ESP-IDF FreeRTOS.
In general, it’s better to use other RTOS primitives like mutex semaphores to protect
against data shared between tasks, rather than vTaskSuspendAll().
Tick Interrupt Synchronicity¶
In ESP-IDF FreeRTOS, tasks on different cores that unblock on the same tick count might not run at exactly the same time due to the scheduler calls from each core being independent, and the tick interrupts to each core being unsynchronized.
In vanilla FreeRTOS the tick interrupt triggers a call to
xTaskIncrementTick() which is responsible for incrementing the tick
counter, checking if tasks which have called vTaskDelay() have fulfilled
their delay period, and moving those tasks from the Delayed Task List to the
Ready Task List. The tick interrupt will then call the scheduler if a context
switch is necessary.
In ESP-IDF FreeRTOS, delayed tasks are unblocked with reference to the tick interrupt on PRO_CPU as PRO_CPU is responsible for incrementing the shared tick count. However tick interrupts to each core might not be synchronized (same frequency but out of phase) hence when PRO_CPU receives a tick interrupt, APP_CPU might not have received it yet. Therefore if multiple tasks of the same priority are unblocked on the same tick count, the task pinned to PRO_CPU will run immediately whereas the task pinned to APP_CPU must wait until APP_CPU receives its out of sync tick interrupt. Upon receiving the tick interrupt, APP_CPU will then call for a context switch and finally switches contexts to the newly unblocked task.
Therefore, task delays should NOT be used as a method of synchronization between tasks in ESP-IDF FreeRTOS. Instead, consider using a counting semaphore to unblock multiple tasks at the same time.
Critical Sections & Disabling Interrupts¶
Vanilla FreeRTOS implements critical sections in vTaskEnterCritical which
disables the scheduler and calls portDISABLE_INTERRUPTS. This prevents
context switches and servicing of ISRs during a critical section. Therefore,
critical sections are used as a valid protection method against simultaneous
access in vanilla FreeRTOS.
On the other hand, the ESP32 has no hardware method for cores to disable each
other’s interrupts. Calling portDISABLE_INTERRUPTS() will have no effect on
the interrupts of the other core. Therefore, disabling interrupts is NOT
a valid protection method against simultaneous access to shared data as it
leaves the other core free to access the data even if the current core has
disabled its own interrupts.
For this reason, ESP-IDF FreeRTOS implements critical sections using special mutexes, referred by portMUX_Type objects on top of specific ESP32 spinlock component and calls to enter or exit a critical must provide a spinlock object that is associated with a shared resource requiring access protection. When entering a critical section in ESP-IDF FreeRTOS, the calling core will disable its scheduler and interrupts similar to the vanilla FreeRTOS implementation. However, the calling core will also take the locks whilst the other core is left unaffected during the critical section. If the other core attempts to take the spinlock, it will spin until the lock is released. Therefore, the ESP-IDF FreeRTOS implementation of critical sections allows a core to have protected access to a shared resource without disabling the other core. The other core will only be affected if it tries to concurrently access the same resource.
The ESP-IDF FreeRTOS critical section functions have been modified as follows…
taskENTER_CRITICAL(mux),taskENTER_CRITICAL_ISR(mux),portENTER_CRITICAL(mux),portENTER_CRITICAL_ISR(mux)are all macro defined to callvTaskEnterCritical()taskEXIT_CRITICAL(mux),taskEXIT_CRITICAL_ISR(mux),portEXIT_CRITICAL(mux),portEXIT_CRITICAL_ISR(mux)are all macro defined to callvTaskExitCritical()portENTER_CRITICAL_SAFE(mux),portEXIT_CRITICAL_SAFE(mux)macro identifies the context of execution, i.e ISR or Non-ISR, and calls appropriate critical section functions (port*_CRITICALin Non-ISR andport*_CRITICAL_ISRin ISR) in order to be in compliance with Vanilla FreeRTOS.
For more details see freertos/include/freertos/portmacro.h and freertos/task.c
It should be noted that when modifying vanilla FreeRTOS code to be ESP-IDF FreeRTOS compatible, it is trivial to modify the type of critical section called as they are all defined to call the same function. As long as the same spinlock is provided upon entering and exiting, the type of call should not matter.
Floating Point Aritmetic¶
The ESP32 supports hardware acceleration of single precision floating point
arithmetic (float) via Floating Point Units (FPU, also known as coprocessors)
attached to each core. The use of the FPUs imposes some behavioral restrictions
on ESP-IDF FreeRTOS.
ESP-IDF FreeRTOS implements Lazy Context Switching for FPUs. In other words,
the state of a core’s FPU registers are not immediately saved when a context
switch occurs. Therefore, tasks that utilize float must be pinned to a
particular core upon creation. If not, ESP-IDF FreeRTOS will automatically pin
the task in question to whichever core the task was running on upon the task’s
first use of float. Likewise due to Lazy Context Switching, only interrupt
service routines of lowest priority (that is it the Level 1) can use float,
higher priority interrupts do not support FPU usage.
ESP32 does not support hardware acceleration for double precision floating point
arithmetic (double). Instead double is implemented via software hence the
behavioral restrictions with regards to float do not apply to double. Note
that due to the lack of hardware acceleration, double operations may consume
significantly larger amount of CPU time in comparison to float.
Task Deletion¶
FreeRTOS task deletion prior to v9.0.0 delegated the freeing of task memory
entirely to the Idle Task. Currently, the freeing of task memory will occur
immediately (within vTaskDelete()) if the task being deleted is not currently
running or is not pinned to the other core (with respect to the core
vTaskDelete() is called on). TLSP deletion callbacks will also run immediately
if the same conditions are met.
However, calling vTaskDelete() to delete a task that is either currently
running or pinned to the other core will still result in the freeing of memory
being delegated to the Idle Task.
Thread Local Storage Pointers & Deletion Callbacks¶
Thread Local Storage Pointers (TLSP) are pointers stored directly in the TCB. TLSP allow each task to have its own unique set of pointers to data structures. However task deletion behavior in vanilla FreeRTOS does not automatically free the memory pointed to by TLSP. Therefore if the memory pointed to by TLSP is not explicitly freed by the user before task deletion, memory leak will occur.
ESP-IDF FreeRTOS provides the added feature of Deletion Callbacks. Deletion Callbacks are called automatically during task deletion to free memory pointed to by TLSP. Each TLSP can have its own Deletion Callback. Note that due to the to Task Deletion behavior, there can be instances where Deletion Callbacks are called in the context of the Idle Tasks. Therefore Deletion Callbacks should never attempt to block and critical sections should be kept as short as possible to minimize priority inversion.
Deletion callbacks are of type
void (*TlsDeleteCallbackFunction_t)( int, void * ) where the first parameter
is the index number of the associated TLSP, and the second parameter is the
TLSP itself.
Deletion callbacks are set alongside TLSP by calling
vTaskSetThreadLocalStoragePointerAndDelCallback(). Calling the vanilla
FreeRTOS function vTaskSetThreadLocalStoragePointer() will simply set the
TLSP’s associated Deletion Callback to NULL meaning that no callback will be
called for that TLSP during task deletion. If a deletion callback is NULL,
users should manually free the memory pointed to by the associated TLSP before
task deletion in order to avoid memory leak.
CONFIG_FREERTOS_THREAD_LOCAL_STORAGE_POINTERS in menuconfig can be used to configure the number TLSP and Deletion Callbacks a TCB will have.
For more details see FreeRTOS API reference.
Configuring ESP-IDF FreeRTOS¶
The ESP-IDF FreeRTOS can be configured in the project configuration menu
(idf.py menuconfig) under Component Config/FreeRTOS. The following section
highlights some of the ESP-IDF FreeRTOS configuration options. For a full list of
ESP-IDF FreeRTOS configurations, see FreeRTOS
CONFIG_FREERTOS_UNICORE will run ESP-IDF FreeRTOS only
on PRO_CPU. Note that this is not equivalent to running vanilla
FreeRTOS. Behaviors of multiple components in ESP-IDF will be modified such
as esp32/cpu_start.c. For more details regarding the
effects of running ESP-IDF FreeRTOS on a single core, search for
occurences of CONFIG_FREERTOS_UNICORE in the ESP-IDF components.
CONFIG_FREERTOS_THREAD_LOCAL_STORAGE_POINTERS will define the number of Thread Local Storage Pointers each task will have in ESP-IDF FreeRTOS.
CONFIG_FREERTOS_SUPPORT_STATIC_ALLOCATION will enable the backported
functionality of xTaskCreateStaticPinnedToCore() in ESP-IDF FreeRTOS
CONFIG_FREERTOS_ASSERT_ON_UNTESTED_FUNCTION will trigger a halt in particular functions in ESP-IDF FreeRTOS which have not been fully tested in an SMP context.
CONFIG_FREERTOS_TASK_FUNCTION_WRAPPER will enclose all task functions
within a wrapper function. In the case that a task function mistakenly returns
(i.e. does not call vTaskDelete()), the call flow will return to the
wrapper function. The wrapper function will then log an error and abort the
application, as illustrated below:
E (25) FreeRTOS: FreeRTOS task should not return. Aborting now!
abort() was called at PC 0x40085c53 on core 0